
�hFPGA�ŗV��ł݂�h�ł́A�Z�~�i�[�p�ɍ쐬�����T���v����H�Ȃǂ����ď����ÂЉ�Ă����܂��B
![]()
![]()
![]() �Z�~�i�J�Â��܂�
�Z�~�i�J�Â��܂�![]()
![]()
![]()
���K�EVerilog HDL�ɂ��FPGA�J���E�v����[FPGA�{�[�h�g�p] �Q����
-- �_����H�̊�b�����K�͉�H�̐v��@�܂Ł@
2026�N9��15��(��)�[16��(��)CQ�o�ŎЃZ�~�i���[��
�ڂ����͂������
![]()
![]()
![]() ZYBO�̖{
ZYBO�̖{![]()
![]()
![]()
FPGA�p�\�R��ZYBO�ō��Linux I/O�~�j�R���s���[�^�@CQ�o�Ł@������
![]()
![]()
![]() Papilio�̖{
Papilio�̖{![]()
![]()
![]()
FPGA��Arduino!!Papilio�ō��f�B�W�^���E�K�W�F�b�g�@CQ�o�Ł@������
��1�P��@�J�������W���[���̉摜���V���A���ʐM��PC�֓]�����Ă݂�
�@�@����͑�10��̉�H�i�J�������W���[���摜�\���j���x�[�X�ɃV���A���ʐM�iUART�j�o�R��PC�։摜�𑗂��H��lj������̂ŁAPC���v���O�����ƍ��킹�ďЉ�܂��B
�@�摜��FPGA����V���A���ʐM�ŏo�͂���USB-UART�ϊ�����o�R����PC�֓]�����܂��B
�@�܂��AVRAM�̏����݂�Ǐo���ŁA�摜�̓������Y���Ȃ��悤�ɁAVRAM��2�̗̈�ɕ����ēǂݏ������s���悤�ɕύX���Ă��܂��B
�@PC���̃v���O�����̊J���͖������p�ł���Microsoft Visual C++2010 Express���g�p���܂����B
�@�]���@��
�@
�@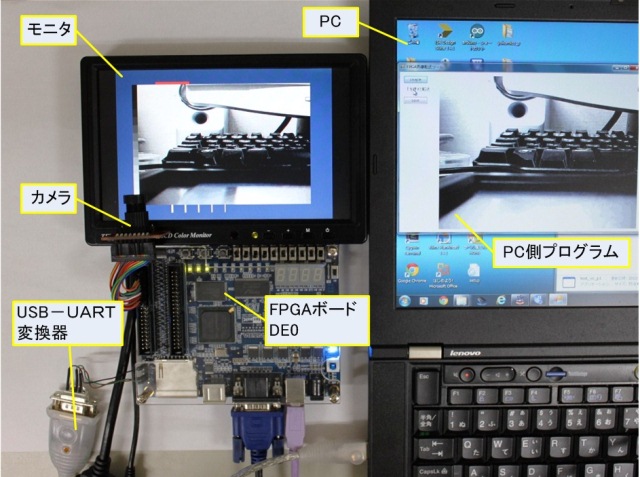
�@���オSVGA���j�^�iRGB�j�A���j�^�̍������J�������W���[���iOV7670�j�A
�@������FPGA�{�[�h�iDE0�j�A����ɂ��̍�����USB-UART�ϊ���A
�@�E���͉摜��]������PC�ł��B
�@ DEO�̃V���A���ʐM�[�q�́ACOM�|�[�g�̒��ڐڑ��ł���d�����x���ŏo�͂���܂��B
�@ �������ADE0��COM�|�[�g�p�R�l�N�^�͂��Ă��Ȃ��̂ŃR�l�N�^��lj�����K�v������܂��B
![]() �J�������W���[���摜PC�]����H�̃\�[�X�izip���k���Ă���܂��j
�J�������W���[���摜PC�]����H�̃\�[�X�izip���k���Ă���܂��j
�@camera_ap_de0_uart_files.zip
�@�@���e
�@�@camera_ap.v�@���Ӊ�H���܂߂�FPGA�̍ŏ�K�w
�@�@read_mem.v�@SDRAM����PC�o�͗p�f�[�^�Ǐo��
�@�@sdram_rd_abt.v�@SDRAM�Ǐo�����N�G�X�g����
�@�@sdram_ctrl.v�@�Ȉ�SDRAM�R���g���[��
�@�@line_buf_in.v�@�����ݗp���C���o�b�t�@
�@�@line_buf_out.v�@�Ǐo���p���C���o�b�t�@
�@�@camera_if.v�@�J�������W���[���C���^�[�t�F�[�X��H
�@�@vram_ctrl.v ���͉摜�̃������ۑ��A�o�͉摜�̃������Ǐo����H
�@�@ov7670_cmd_genv ov76�V�O�̐ݒ���̐���
�@�@i2c_ov7670_ctrl�Dv�@ov76�V�O�̐ݒ���i2c���W���[��������
�@�@svga_if.v SVGA�摜�o�͉�H�i��4��ŏЉ�)
�@�@layer_a.v�@�ړ����锠�̃O���t�B�b�N�����i��4��ŏЉ��j
�@�@layer_b.v�@�J���[�p�^���̃O���t�B�b�N�����i��4��ŏЉ��j
�@�@msg_buf.v�@���b�Z�[�W�o�b�t�@��H(��8��ŏЉ�)
�@�@fifo.v�@���b�Z�[�W�ێ��pFIFO(��8��ŏЉ�)
�@�@ram.v�@���b�Z�[�W�ێ��pFIFO�pRAM(��8��ŏЉ�)
�@�@rs232c_txrx.���@�V���A���ʐM�iRS232C�j�C���^�[�t�F�[�X���W���[��(��R��ŏЉ�)
�@�@camera_ap_test.v camera_ap�̃e�X�g�x���`
�@�@c��mera_ap.qsf�@FPGA�{�[�h��DE0���g�p�����ꍇ��PIN�z�u�w��
�@�@camera_ap.mif�@OV7670�ݒ�p��ROM�f�[�^�t�@�C��
�@�@vcpp_program/test_vc_p1.exe PC���摜�]���v���O����
�@�@vcpp_program/test_vc_p1_src.txt �@PC���摜�]���v���O�����̃\�[�X�R�[�h�̈ꕔ
�@
�@��camera_ap.v���g�b�v��H����Quartus�U�̃v���W�F�N�g���쐬���Ă�������
�@��test_vc_p1_src.txt �̓\�[�X�̈ꕔ�ł��BVC++�̃v���O���������ꍇ�̎Q�l�ɂ��Ă�������
�@���S�Ẵt�@�C�����X�V����Ă��܂��̂ŁA���̃y�[�W���k�f�[�^�ɓ����Ă���vrilog�\�[�X���g�p���Ă�������
�@�����̉�H���g�p����ꍇ�́A���ȐӔC�ł��肢���܂��B
![]() FPGA�ł̓������e
FPGA�ł̓������e
�@![]() FPGA�g�b�v���W���[���icamera_ap.v�j
FPGA�g�b�v���W���[���icamera_ap.v�j
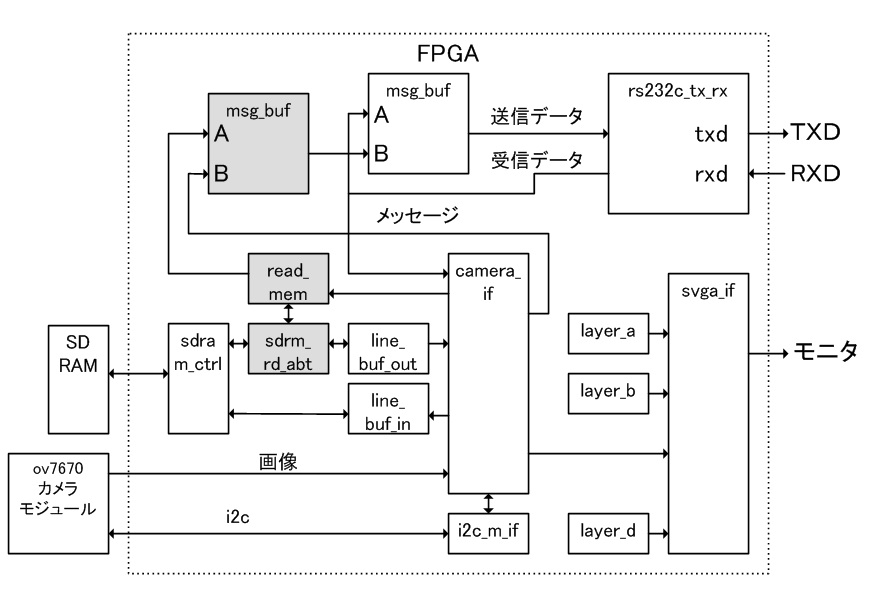
�@�@��10��̉�H��read_mem,sdram_abt,msg_buf��lj����Ă��܂��B���̃��W���[�����ύX�������Ă��܂��B��{����͑�10��A��9��i���̂P,����2�j���Q�Ƃ��Ă��������B
�@�@�lj��̋@�\�͈ȉ���2�_�ł��B
�@�@�P�DVRAM�̏����ݓǏo���ʼn摜�Y���h�~
�@�@��10��܂ł́AVRAM��1��ʂ��������Ă��Ȃ������̂ŁA�����݂ƓǏo���ʼn摜�̃Y���������Ă��܂����B�����VRAM��
�@�@2��ʕ��̗̈���g���A�����݂ƓǏo���œ����̈�ɃA�N�Z�X���Ȃ��悤�ɂ��ĉ�ʂ̃Y����h�~���܂����B
�@�@2�D�摜�]���@�\
�@�@�V���A���ʐM��'M'+CR+LF����M����ƁA���̎��_�œǏo���Ɏg���Ă���VRAM�̈���f�[�^���V���A���ʐM�œ]�����܂��B
�@�@���j�^�\���p�̓Ǎ��݂ƃV���A���ʐM�p�̓Ǎ��݂���������̂�sdram_rd_abt�ŃA�N�Z�X�̒�������Ă��܂��B
�@�@�ȉ��̓u���b�N�}�ł��B�O���[�̃��W���[��������lj��������W���[���ł��B
![]() FPGA�lj��@�\�̓���ڍ�
FPGA�lj��@�\�̓���ڍ�
�@![]() VRAM�̏����ݓǏo���ʼn摜�Y���h�~
VRAM�̏����ݓǏo���ʼn摜�Y���h�~
�@�@�V���A���ʐM�ɂ��摜�]�����s���ĂȂ��ʏ��Ԃł́A�J�������W���[������̃f�[�^��vram0�̈��vram1�̈�Ɍ��݂ɏ����݂��s���B
�@���j�^�o�͗p�Ǐo���ł́A�Ǐo���J�n���Ƀf�[�^�����ݒ��łȂ�vram�̈��I�����ēǏo�����s���B���j�^�p�Ǐo�������̕��������݂��
�@�Z���Ԃł���̂ŁA�������݂�ǂ��z���ēǏo�������邱�Ƃ��Ȃ��Ȃ�A�摜�̃Y����h�~�ł���B
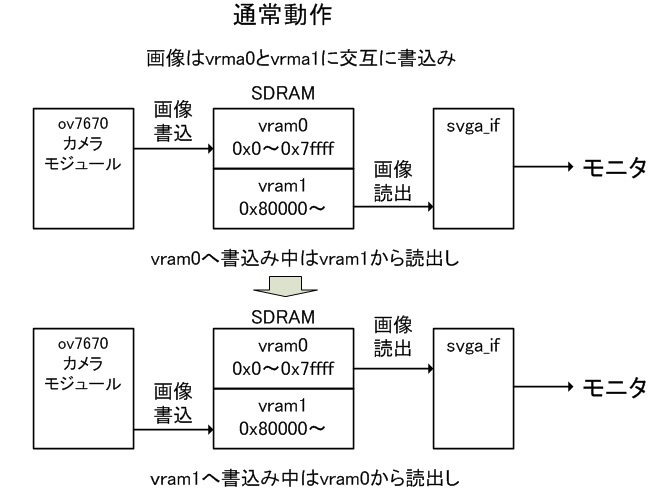
�@�@�@�V���A���ʐM�ɂ��摜�]�����s���Ă����Ԃł́A�V���A���ʐM�p�f�[�^�Ǐo���́A���j�^�o�͗p�Ǐo�����s���Ă���vram�̈悩��Ǐo�����s���B
�@�V���A���ʐM�p�f�[�^�Ǐo�������́A�摜�̏����ݎ�����蒷���̂ŁA�V���A���ʐM�p�f�[�^�Ǐo�����̉摜�f�[�^�����݂́A�Ǐo���Ɏg���ĂȂ�vram�̈�ɌŒ肷��B
�@l����ɂ��V���A���ʐM�œ]������摜�̃Y����h�~����B���̂Ƃ����j�^�o�͗p�Ǐo���̗̈���Œ肳���̂ŁA�]�����̃��j�^�\���͓]�����̉摜�̐Î~��ɂȂ�B
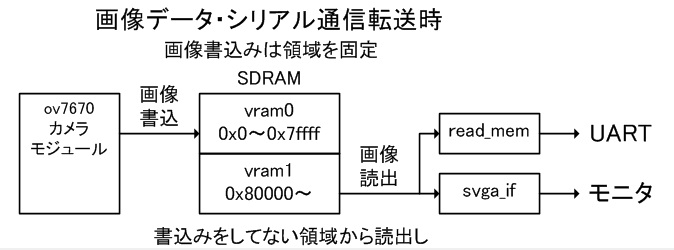
�@![]() �摜�]���@�\
�摜�]���@�\
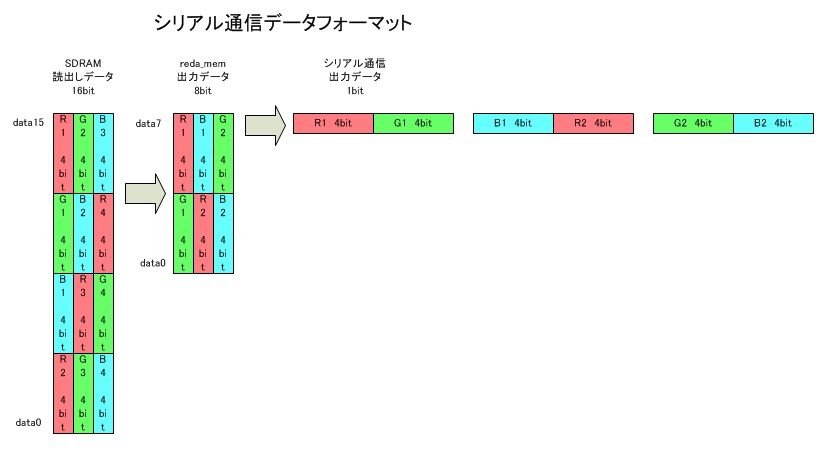
�@�@'M'+CR+LF���V���A���ʐM�Ŏ�M����ƁA�摜�������ݒ��łȂ�VRAM�̈悩��f�[�^��Ǐo���ăV���A���ʐM�œ]�����܂��B
�@�V���A���ʐM�̓{�[���[�g=921.6kHz�A�f�[�^8bit�A�p���e�Bbit=�Ȃ��A�X�g�b�vbit=1bit�œ��삵�܂��B
�@�ȉ��̐}��RGB�f�[�^�̃f�[�^�t�H�[�}�b�g�ɂȂ�܂��B
�@
![]() PC�̉摜��荞�݃\�t�g
PC�̉摜��荞�݃\�t�g
�@�@�摜��荞�݃\�t�g�́A�����ŗ��p�ł���Microsoft Visual C++2010 Express�i�ȉ�VC++�j�ō��܂����B�T���v���f�[�^�ɓ����Ă���v���O�����́AVC++�̃����^�C�����C�u���������g�p����̂�
�@���s�ɂ�VC++�̃C���X�g�[�����K�v�ł��B�@VC++�̏ڍׂ�C���X�g�[�����@�ɂ��܂��Ă̓}�C�N���\�t�g�Ђ̃T�C�g��Q�l�������Q�l���������B
�@�܂��A�T���v���̃v���O�����͊e��ݒ��G���[�����Ȃǐ��荞��ł��܂���B�����܂ł��Q�l�p�Ƃ��l�����������B
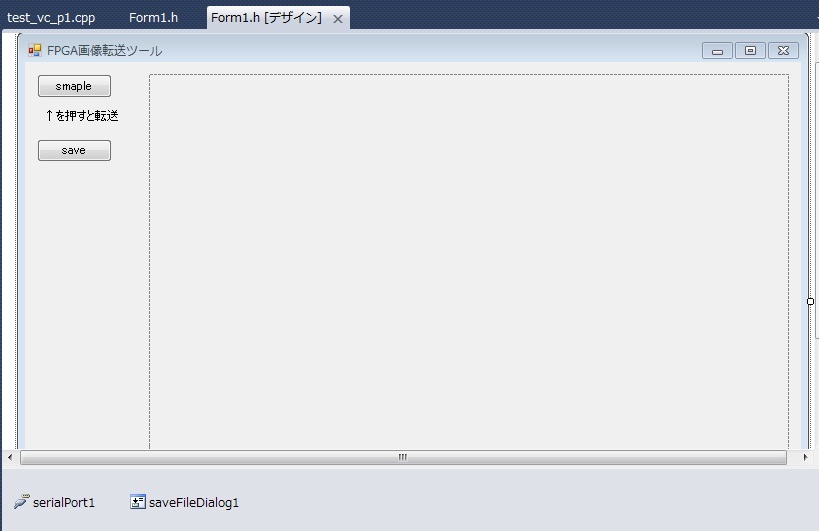
�@�@���̐}��VC++��Form�̃f�U�C���ł��Bsample�{�^���������ƁA�V���A���ʐM��'M'+CR+LF�𑗐M���܂��B���̌��FPGA���瑗���Ă���f�[�^����M����荞��pictureBox1�ɉ摜��\�����܂��B
�@save�{�^���������ƁA�摜�f�[�^���t�@�C���ɕۑ����܂��B�R���|�[�l���g�g���C�ɂ́A�V���A���ʐM�p�R���|�[�l���g�Ƃ���serialPort1�A�t�@�C���Z�[�u�p�R���|�[�l���g�Ƃ���saveFileDialog1��z�u���Ă��܂��B
�ȉ��̓\�[�X�t�@�C���̔����itest_vc_p1_src.txt�j�ł��BVC++�̃v���O���������ۂɎQ�l�ɂ��Ă��������B
�V���A���|�[�g�̐ݒ�̓\�[�X���Ŏw�肵�Ă��܂��BCOM�|�[�g�ԍ���PC�ɂ��Ⴄ�̂Ŏg�p����PC�ɍ��킹�ĕύX�̕K�v������܂��B
�\�[�X�R�[�h��ύX���čăr���h���Ă��������B
//---------------------------------------------------------------- |
�@![]() ����̗l�q
����̗l�q
�@�@FPGA�{�[�h�ƃJ�������W���[���AFPGA�{�[�h�̉�H�_�E�����[�h�pUSB�[�q��PC��USB�[�q�AUSB-UART�ϊ���o�R��FPGA�̃V���A���ʐM�[�q��PC��USB�[�q�����ꂼ��ڑ����܂��B
�@�d��������FPGA�։�H�f�[�^���_�E�����[�h����ƃf�B�X�v���C�̒�����FPGA�̃J�����̉摜���\������܂��B����PC���̉摜��荞�݃\�t�g��sample�{�^���������ƁA
�@�V���A���ʐM��FPGA����PC�։摜���̓]�����s���܂��B�]�����̓��j�^�̉摜�͒�~���܂��B�]���ɂ�11�b������܂��B
�@�]�������������PC�̉摜��荞�݃v���O�����̃E�B���h�ɉ摜���\������܂��B

�Љ����H�������ꍇ�́A���ȐӔC�ł��肢���܂��B
�����N�t���[�ł��B![]()
�����N���ꂽ�ꍇ�͂��A��������������Ɗ������ł��B
���[���F![]()
�ύX����
(2012/8/22)�@����